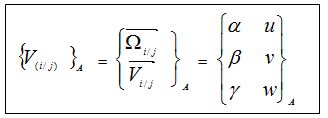
3) Torseur cinématique associé à une liaison:
A toute liaison élémentaire on peut associer un torseur cinématique représentant le mouvement le plus général, compatible avec la liaison.
Sa forme canonique sera obtenue dans le repère idéal.
Remarque : Le nombre d’inconnues a priori non nulles parmi les 6 possibles constitue le nombre de
degrés de liberté de la liaison (Nc).
4) Torseur d'effort transmissible par une liaison:
A toute liaison élémentaire on peut associer un torseur d’effort transmissible par la liaison.
Sa forme canonique sera obtenue dans le repère idéal.
Remarque : Le nombre d’inconnues a priori non nulles parmi les 6 possibles constitue le nombre de
degrés de liaison de la liaison (Ns).
1) Paramétrage et repère idéal:
L’étude d’un système mécanique nécessite le choix d’un repère général dans lequel
on peut se situer toutes les liaisons. On le note (O,x,y,z) et il est orthonormé direct.
On associera à chaque liaison du système (pour une position de ce dernier) un repère
Local que l’on appellera « Repère IDEAL » et noté (A,x1,y1,z1).
L’origine A du repère idéal est le Centre Géométrique de la Liaison.
2) Degrés de liberté d'une liaison mécanique élémentaire
Le nombre de degrés de liberté d’une liaison mécanique entre 2 solides S1 et S0 correspond au nombre de Mouvements Possibles Indépendants que peut faire S1/S0 (ou inversement).
Exemple :
Mouvements possibles indépendants : 2
Nombres de degrés de Liberté : Nc = 2
Nombres de degrés de Liaison : Ns = 4