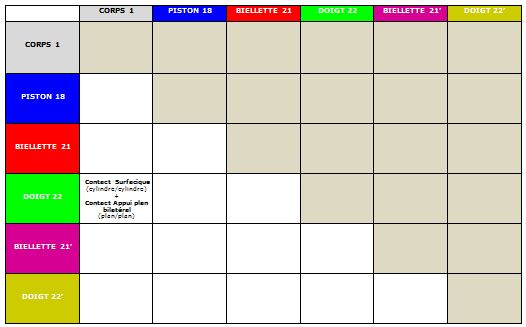
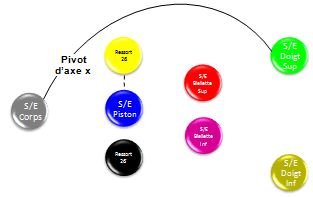
- Etape 2: "Graphe de Liaisons"
Objectif : Définir les liaisons mécaniques existantes entre les classes d'équivalence constituées
lors de l'étape 1.
Ces liaisons déterminées et les surfaces de contact associées permettront de définir
plus facilement le type de "contraintes d'assemblage" qu'il faudra mettre en place
entre les Sous-Ensembles lors de l'étape 4 .