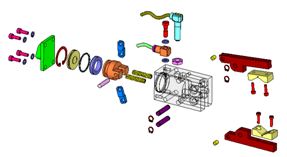
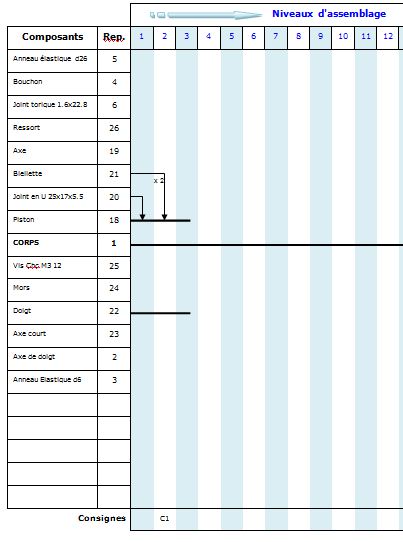
A partir de l’animation « Démontage » , de la nomenclature et du plan d'ensemble 2D, compléter le graphe de montage de la pince .
La pince étant symétrique /xy, on ajoutera (x2) dans le graphe, pour les composants « doublés »
(ex : doigt 22 ,…).
On ne fera pas apparaitre le montage des composants externes (7,8,9,11,12,13,14,15,16)