Après avoir observé le fonctionnement de la machine,
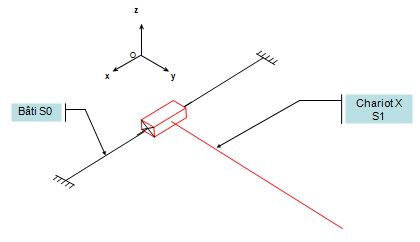
Représenter sous forme de schéma cinématique spatial les liaisons
qui existent entre :
- Le chariot X : repère 1
- Le chariot Y : repère 2
- Le chariot Z : repère 3
- Le préhenseur : repère 4
- Le bâti : repère 0
Représenter le schéma ci-contre en représentation plane :
une vue suivant x,y et une autre suivant y,z
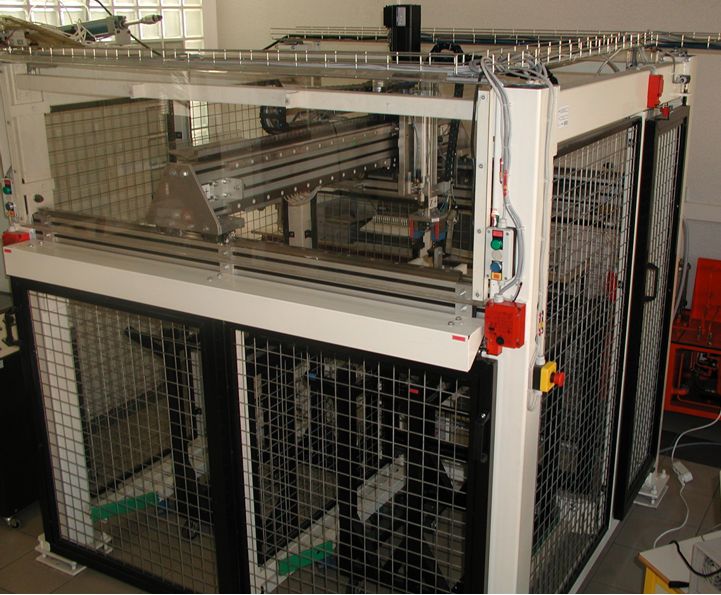
Le portique « deux axes asservis » est destiné à décharger des racks contenant des plaques de batteries de traction.
Le chargement des racks est assuré manuellement par l’opérateur.
Afin d’améliorer la productivité de la machine, un système de sas permet à l’opérateur de charger un rack plein pendant qu’un autre est en cours de déchargement.