SW TPn°2 (7zip)
SW TPn°1 (7zip)
TPN°1 : "Etude cinématique de la pince"
Le but est de modéliser cinématiquement la pince afin de
vérifier certaines de ses performances (course,vitesse,...)
TPN°2 : "Etude statique de la pince"
Mesurer l'effort réel développé par la pince sous 6 bars et
interpréter les différences par rapport au modèle volumique.
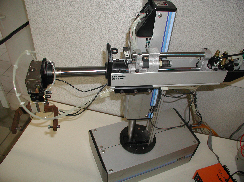
Le bras manipulateur Schrader est intégré dans un système automatisé
qui permet d'effectuer un tri de pièces. 2 types de pièces sont traités.
Le bras manipulateur pneumatique assure la préhension des pièces et le
transfert vers les magasins respectifs de dépose.
L'ensemble du cycle est géré par un automate Télémécanique TSX 17.