SW TPn°1 (7zip)
TPN°1 : "Etude cinématique de la transmission de puissance"
Verifier la vitesse de déplacement annoncé par le constructeur et értudier les solutions technologiques mises en oeuvre pour la respecter.
TPN°2 : "Etude énergétique de la tondeuse"
Transmettre une puissance suffisante aux roues motrices pour gravir une
pente de 15°. Etude statique.
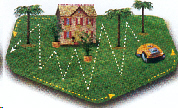
La tondeuse robot RL500 permet la tonte
en autonomie complète d’une pelouse dont
la surface maximum de la zone de tonte peut
avoisiner 250 m2.
Chaque zone de tonte est délimitée par un fil électrique périphérique
tendu à même le sol et alimenté par un boîtier électronique (commutateur
de périmètre).
La mise en service du commutateur de périmètre permet
l’établissement d’un champ magnétique reconnaissable par la tondeuse
robot.
Les zones de tonte interdites (parterre de fleurs, piscine, bassins, etc…)
sont également délimitées par un champ magnétique. Les obstacles pleins
(arbres, murs, etc…) sont eux directement évités par la tondeuse robot
(détecteurs dans les pare-chocs).
Après une initialisation lors de la première mise en service, la tondeuse
robot commence par tondre la périphérie de la zone de tonte avant de tondre
de manièrealéatoire le reste de la zone délimitée.